VOICE CONTROLLED ROBOT WITH COMPUTER VISION AND ROBOTIC ARM
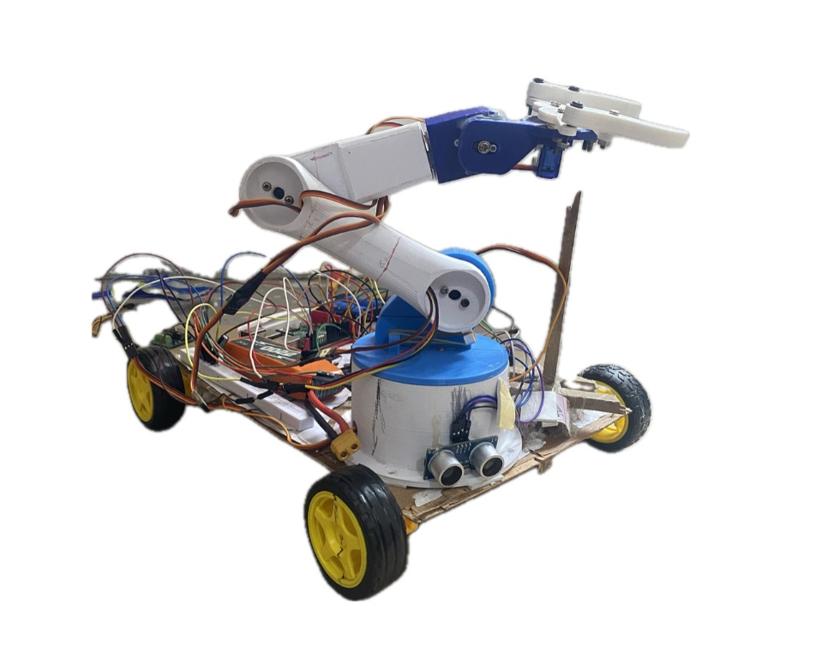
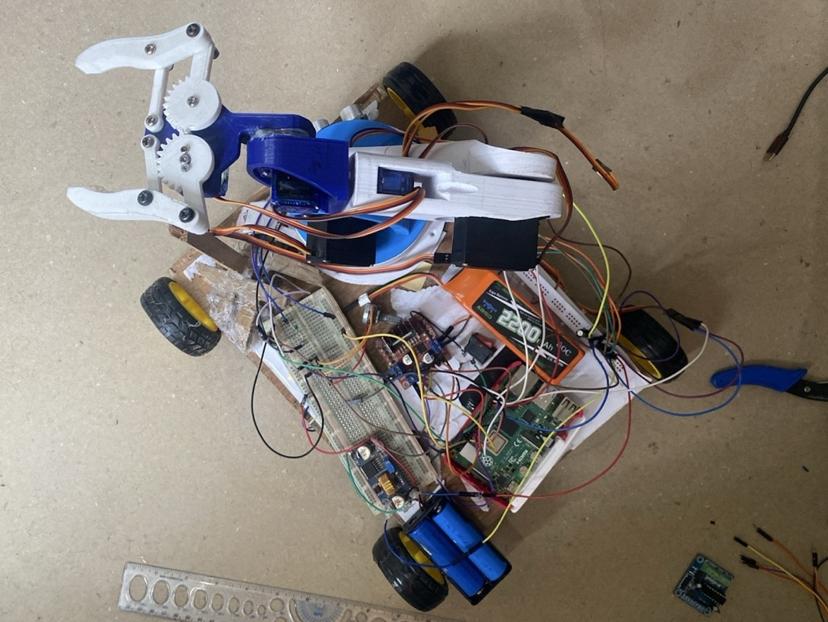
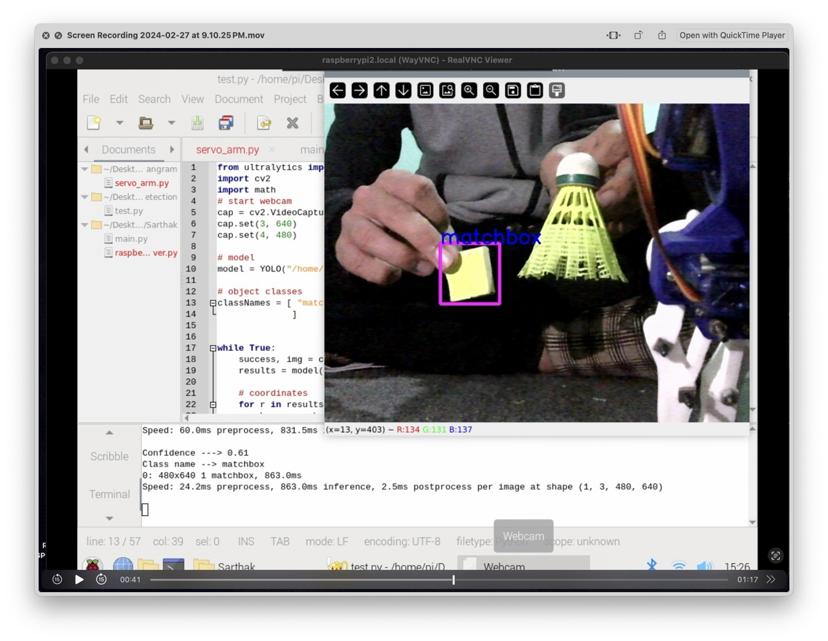
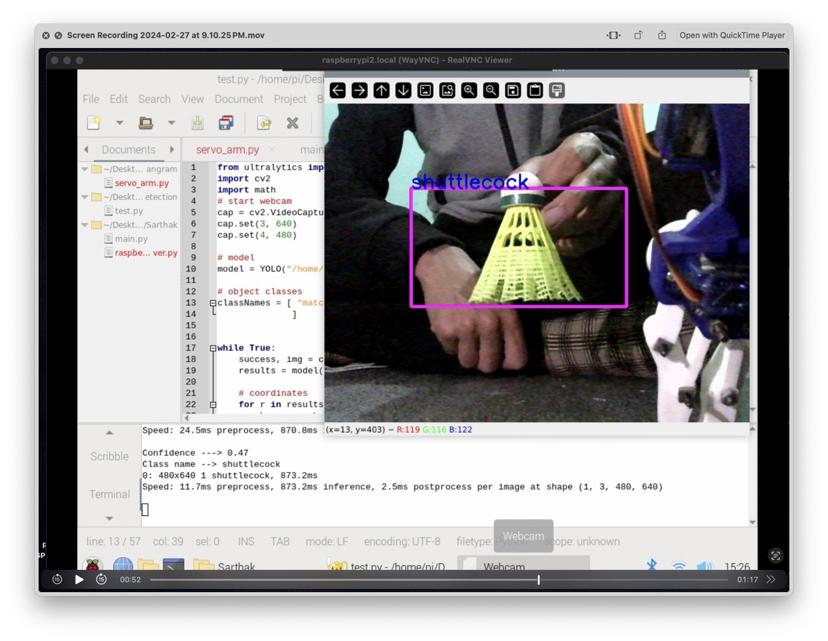
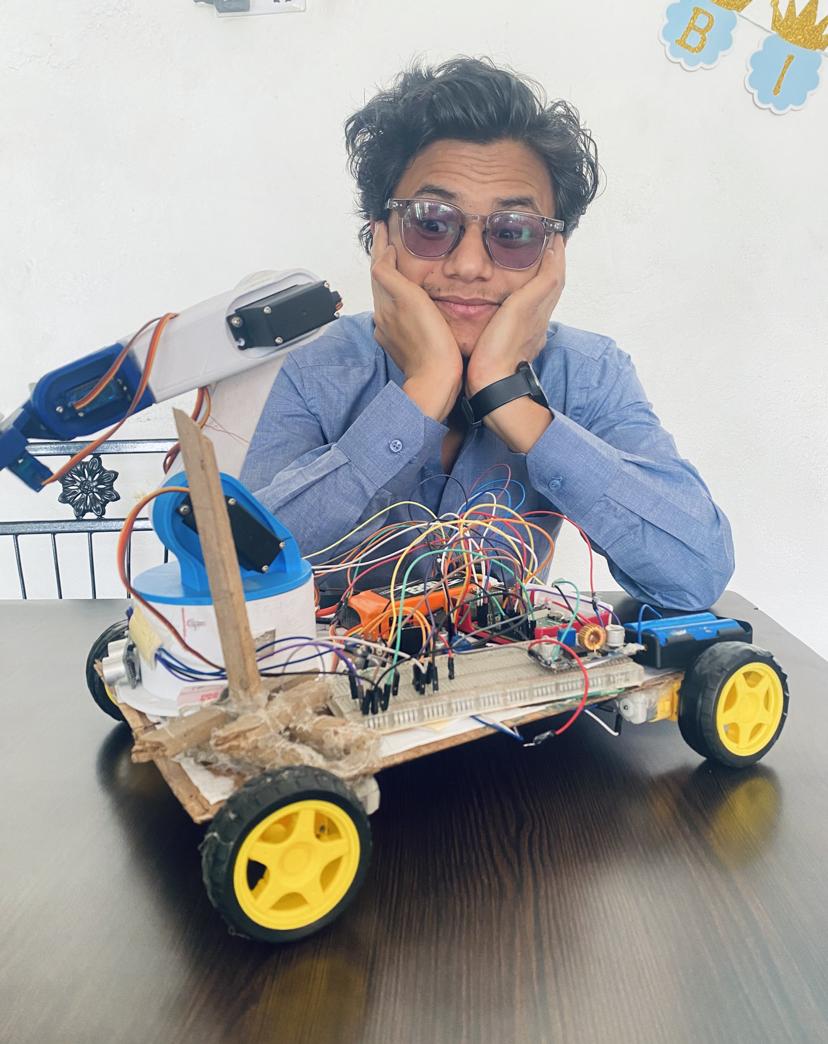
The proposed project aims to create a sophisticated Voice-Controlled Robot with Computer Vision and Robotic Arm, using the latest technologies in voice recognition, computer vision, and robotics. It uses computer vision to detect an object, ultrasonic sensor to find the distance and robotic arm to pick up that object. The main goal is to build a versatile and user-friendly robot that can understand spoken commands through speech to text conversion, move around independently using computer vision, and perform complex tasks accurately using its robotic arm. This combination of smart features aims to provide a smooth and flexible robot that can be used in different areas based on user requirements.
Background --------------------------- The development of intelligent and interactive robotic systems has been making possible considerable breakthroughs in the field of robotics, artificial intelligence and computer vision in this era. An innovative integration of voice recognition, computer vision, and robotics technology, this proposal describes a project to build and implement a voice-controlled robot with a computer vision-based robotic arm. The goal of the project is to develop a flexible and user-friendly robotic system that can interact with things in its environment using a robotic arm, comprehend spoken commands, and see its environment through computer vision Motivation --------------------------- The goal of this project is to build a smart robot capable of handling activities with little assistance from humans and interacting with users in a straightforward and natural manner. The robot can comprehend user instructions and analyzes visual clues by support of combination of voice control and computer vision, enabling a smooth and effective interaction between humans and robots. A robot with this much versatility might be used in a wide range of fields, including healthcare, education, and industrial automation, as well as home and office automation. Problem Statement --------------------------- The problem statement proposes the development of an innovative Voice-Controlled Robot with a Computer Vision-Based Robotic Arm. The primary aim is to overcome the limitations of conventional robotics by creating a user-friendly system that can be controlled using natural language voice commands. By integrating computer vision technology, the robot will have enhanced spatial awareness and object recognition capabilities, enabling it to perform tasks with higher precision. The project seeks to revolutionize human-robot interaction and open up possibilities for various applications in manufacturing, healthcare, household assistance, and more.
For extensive detail, go to Published Site or Related Important Files section:
Published SiteConclusion & Result
Through the integration of voice recognition, computer vision, and robotic manipulation technologies, this project enables the creation of a versatile and interactive robotic system capable of performing various tasks and responding to user commands. In summary, the voice-controlled robot with a computer vision-based robotic arm project serves as a compelling platform for innovation, learning, and exploration in the exciting field of robotics and artificial intelligence. Through creativity, dedication, and a spirit of inquiry, we can unlock new possibilities and shape the future of human-robot interaction.
Authors
Er. Mahesh Bogati (Project Lead)
Tribhuvan University
076bei018@ioepc.edu.np
Er. Sangram Bhandari (Project Manager)
Tribhuvan University
076bei030@ioepc.edu.np
Er. Sarthak Chaudary (Project Member)
Tribhuvan University
076bei034@ioepc.edu.np
Ankita Rai Khaling (Project Member)
Tribhuvan University
075bei005@ioepc.edu.np
Related Important Files
About file: Project Detailed Final Submitted Report at Defense
Technologies & Tags
Code Repository
voice-controlled-robot-with-computer-vision-and-robotic-arm.github
Citations & References
REFERENCE :- S. Yuvaraj, A. Badholia, P. William, K. Vengatesan, and R. Bibave, “Speech recognition based robotic arm writing,” in Proceedings of International Conference on Communication and Artificial Intelligence: ICCAI 2021. Springer, 2022, pp. 23-33.
REFERENCE :- B. S. Babu, V. Priyadharshini, and P. Patel, “Review of voice controlled robotic arm-raspberry pi,” European Journal of Electrical Engineering and Computer Science, vol. 5, no. 2, pp. 1–4, 2021.
REFERENCE :- M. Abdullah-Al-Noman, A. N. Eva, T. B. Yeahyea, and R. Khan, “Computer vision-based robotic arm for object color, shape, and size detection,” Journal of Robotics and Control (JRC), vol. 3, no. 2, pp. 180–186, 2022.
REFERENCE :- J. I.-Z. Chen and J.-T. Chang, “Applying a 6-axis mechanical arm combine with computer vision to the research of object recognition in plane inspection,” Journal of Artificial Intelligence and Capsule Networks, vol. 2, no. 2, pp. 77–99, 2020.
REFERENCE :- P. Kanade, P. Alva, S. Kanade, and S. Ghatwal, “Automated robot arm using ultrasonic sensor in assembly line,” International Research Journal of Engineering and Technology (IRJET), vol. 7, no. 12, pp. 615–620, 2020.
External Links and Works
Gallery