SERVO DRIVEN FINGER GESTURE CONTROL BASED ON COMPUTER VISION
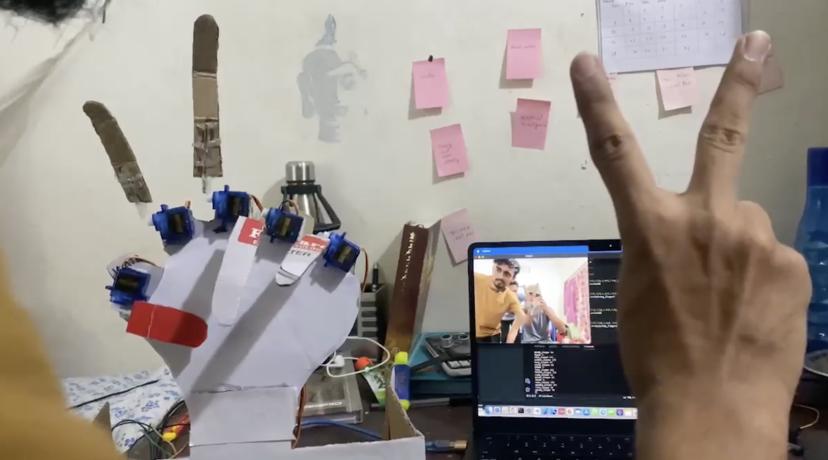
Based on the computer vision and Arduino broad control, the program is automatic after execution; first it decides either the palm is detected or not, if detected the actor is good to go for showing gesture regarding fingers only and then physical palm will mimic with respect to actor palm else it will terminate the model and reopen the webcam screen. The looping will work till we quit it manually. The aim of this project is to show the various wonderful application possibilities of computer vision combined with robotics. This project will use computer vision techniques and some essential python libraries to process the image of the palm and mimic the movement of the fingers with the provided degree of freedom to the appendage.
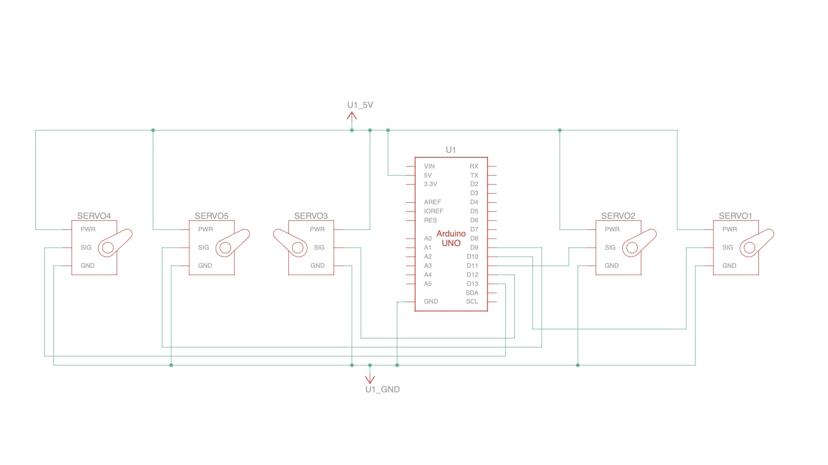
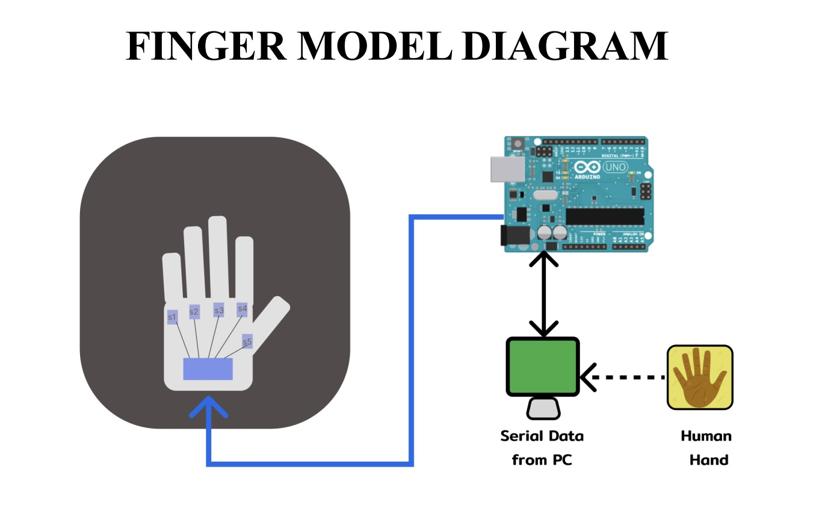
Introduction of Project ---------------------------------- Computer vision is a technology which is increasingly in the spotlight and it is important for everyone involved in the field of technology to understand the possibilities it presents and its current progressively more complex and powerful cameras are being integrated into many devices, and this in turn pushes the development of more complex vision systems. The possibility of computer vision has boosted along with the advancement of artificial intelligence. Computer vision is the automation of the Human Visual System so that computers can obtain high level of understanding of the environment from digital images and videos. Robot vision is made up of complex algorithms, cameras and any other hardware that enables robot to develop visual sights. So, we conclude that computer vision is the eye of a robot. This allows machines to carry out complex visual tasks such as a robotic arm or palm programmed to mimic a visual gesture by a human. Motivation ---------------------------------- In this project we aim to reduce human effort with minimal human intervention. Today's systems are reducing in size and cost, we interfaced the prototype of hand with an Arduino UNO. Our project provides a secure approach with the aim of lowering risk of human life. This risk includes working in hazardous environment like mines, radioactive areas and so on. Inaccessible areas like outer space, extreme temperature areas etc. can also be interacted with human like precision Problem Statement ---------------------------------- The problem is to develop the mimicking system for fingers of shown palm on the web- cam. For this mimicking system we need to develop the palm model using computer vision, pyfirmata and mediapipe. After the model is ready, the system will mimic same way as our palm fingers mimic. This model will work for simple gestures or mimics. Objectives ---------------------------------- • To detect the palm using computer vision. • To mimic the respective gesture of fingers. Scope and Applications ---------------------------------- This mimicking system of fingers can be applied to many fields such medical, physics, chemistry and others where we can adopt the robotic method by replacing human hazard and harmful zones.
Conclusion & Result
After the model was executed, we were able to achieve the efficiency above 90%, But due to signal conversion, signal transformation time, signal transferring time, web-cam Jeo quality, distance of palm from the webcam and other miscellaneous issues, we were satisfied to the accuracy of our rest The finger model performs with 12° to 20° marginal difference of response mimicking of human finger's actual deflection or finger's full degree of freedom. While operating the model on real time, we encountered multiple times with the average mimicking response time differences of 0.58 second.
Authors
Er. Mahesh Bogati (Team-Work)
Tribhuvan University
076bei018@ioepc.edu.np
Er. Sangram Bhandari (Team-Work)
Tribhuvan University
076bei030@ioepc.edu.np
Er. Sarthak Chaudary (Team-Work)
Tribhuvan University
076bei034@ioepc.edu.np
Related Important Files
About file: Submitted project report PDF File.
About file: Executed prototype python program
Technologies & Tags
Code Repository
servo-driven-finger-gesture-control-based-on-computer-vision.github
Citations & References
REFERENCE :- [1] K. Ohnishi, T. Tajima, Y Saito, "Anthropomorphic hand control for robotic hand-arm system", IEEE Transactions on Mechatronics, pp. 1255-1259, 2000
REFERENCE :- [2] Jakub Segen and Senthil Kumar, Bell Laboratories. "Shadow Gestures: 3D Hand Pose Estimation using a Single Camera", IEEE Transactions on Image processing, pp. 479-485,1999
REFERENCE :- [3] A. D. Kulkarni, Computer vision and fuzzy-neural systems. Prentice Hall PTR, 2001, ch. 2 and ch. 6.
REFERENCE :- [41 D. A. Forsyth, J. Ponce, Computer vision: a modern approach. Prentice Hall Professional Technical Reference, 2002, ch. 15.
External Links and Works
Gallery